

Planning




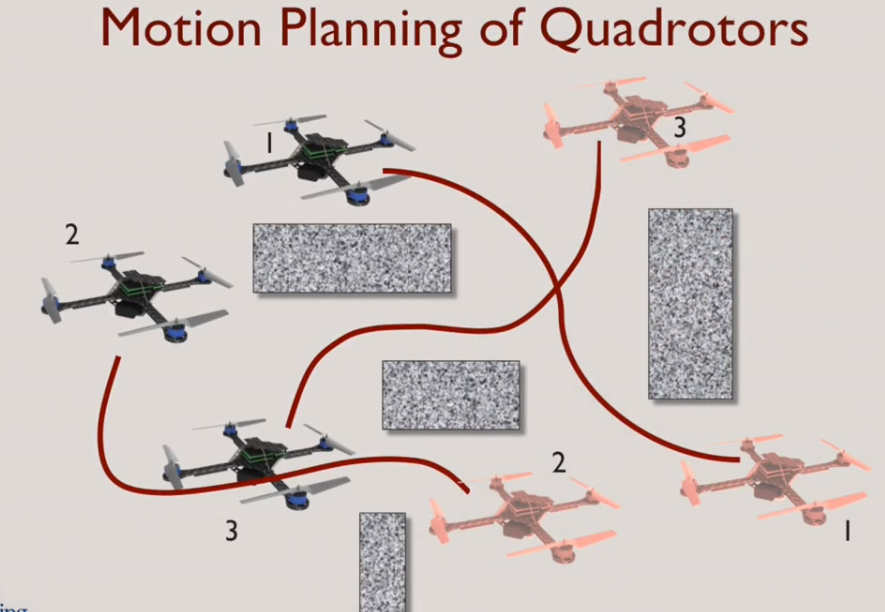






collision-free
本文共 74 字,大约阅读时间需要 1 分钟。
Planning
collision-free
转载于:https://www.cnblogs.com/ecoflex/p/9785899.html